驱动器其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分。目前主流的均采用数字信号处理器(DSP)作为控制核心,能轻松实现很复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检验测试保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。

功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整一个完整的过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。
伺服驱动器通常能采用位置、速度和力矩三种控制方式,主要使用在于高精度的定位系统,目前是传动技术的高端。随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今较为重要的技术课题,慢慢的变多工控技术服务商对伺服驱动器进行了技术深层次研究。
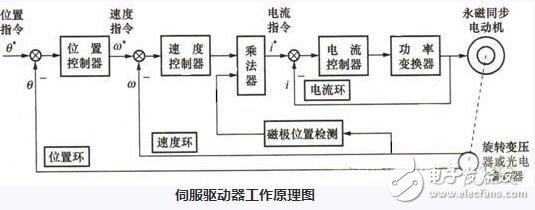
伺服驱动器是现代运动控制的重要组成部分,被大范围的应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器慢慢的变成了国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制管理系统,特别是速度控制性能的发挥起到关键作用。
在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。为寻求测量精度与系统成本的平衡,一般都会采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T测速法。M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:
(2)用于测速的2个控制管理系统定时器开关难以严格保持同步,在速度变化较大的测量场合中没办法保证测速精度。因此应用该测速法的传统速度环设计的具体方案难以提高伺服驱动器速度跟随与控制性能。

伺服驱动器可以再一次进行选择的工作模式有:开环模式、电压模式、电流模式(力矩模式)、IR补偿模式、Hall速度模式、编码器速度模式、测速机模式、模拟位置环模式(ANP模式)。(以上模式并不全部存在于所有型号的驱动器中)
输入命令电压控制驱动器的输出负载率。此模式用于无刷电机驱动器,和有刷电机驱动器的电压模式相同。
输入命令电压控制驱动器的输出电压。此模式用于有刷电机驱动器,和无刷电机驱动器的开环模式相同。
输入命令电压控制驱动器的输出电流(力矩)。驱动器调整负载率以保持命令电流值。如果伺服驱动器可以速度或位置环工作,一般都含有此模式。
输入命令控制电机速度。IR补偿模式可用于控制无速度反馈装置电机的速度。驱动器会调整负载率来补偿输出电流的变动。当命令响应为线性时,在力矩扰动情况下,此模式的精度就比不上闭环速度模式了。
输入命令电压控制电机速度。此模式利用电机上hall传感器的频率来形成速度闭环。由于hall传感器的低分辨率,此模式一般不用于低速运动应用。
输入命令电压控制电机速度。此模式利用伺服电机上编码器脉冲的频率来形成速度闭环。由于编码器的高分辨率,此模式可用在所有速度的平滑运动控制。
输入命令电压控制电机速度。此模式利用电机上模拟测速机来形成速度闭环。由于直流测速机的电压为模拟连续性,此模式适合很高精度的速度控制。当然,在低速情况下,它也容易受到干扰。
输入命令电压控制电机的转动位置。这其实是一种在模拟装置中提供位置反馈的变化的速度模式(如可调电位器、变压器等)。在此模式下,电机速度正比于位置误差。且具有更快速的响应和更小的稳态误差。

国产伺服产品技术攻关大多数还停留在可靠性层面,只有可靠的产品才能被市场认可,才能真正带给它的用户以价值。国产伺服可靠性不足集中体现在电源不稳定、器件降额不够,这些不可靠因素主要体现在关键器件的电应力和热应力的可靠性,其次还有电磁扰动对电路功性能的影响,本文以一个案例的方式讨论电源和器件应力。
伺服系统最基本的性能是力矩、转速、位置的精确性以及响应速度。但凡讨论伺服性能,我们一定要站在系统层面来讨论,把电机性能包括在其中。本文在探讨性能测试方面,给出了力矩响应、速度响应、定位精度和重复定位精度的测试方法。
辅助电源不仅给控制芯片、驱动芯片、接口电路、风机供电,而且伺服驱动器给外部提供24V电源。所以开关电源短路保护功能特别的重要,我们分别取最低电源电压(DC200V)、正常电源电压(DC311V)、最高电源电压(DC400V)三个点,测试辅助电源的保护功能。
测试时,辅助电源输入通过调节直流调压器给定,将母线电源电压分别调节到DC200V、DC311V、DC400V,然后依此分别将输出短路,本文以5V,24V两路输出的一个实际产品为例讨论。测试方法就是将其中一路短路,测量另外一路输出。

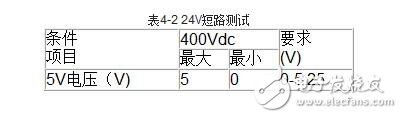
试验根据结果得出,在5V,24V短路时,芯片都进入打嗝状态,即满足输出短路保护试验要求。
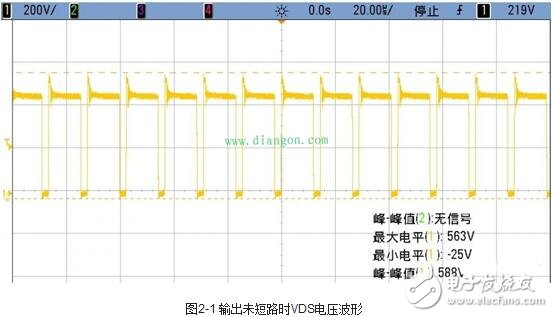
Topswitch器件VDS电压指集成PWM控制器内部IGBT漏极和源极之间的的电压,VDS超标是其损坏的根本原因之一,VDS直接影响伺服驱动器的可靠性和寿命,测试方法是通过调压器调节辅助电源输入电压,测量VDS电压。输入电压越高,VDS电压越高,即在母线V)时,VDS电压最高,测量这个最大值是否超标,可判断Topswitch电压应力是否合格。
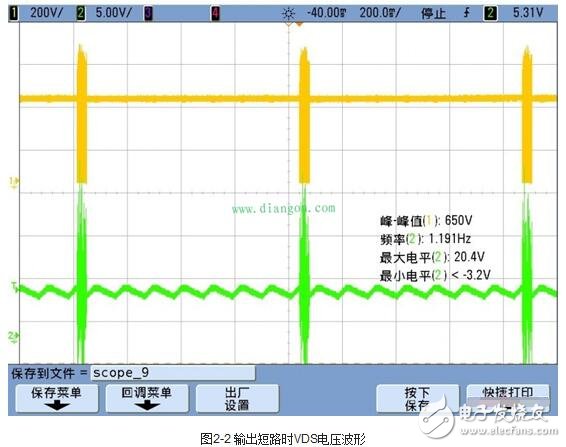
还有一种情况,辅助电源输出短路时,VDS会特别高,需要判断短路时Topsweitch电压应力是否合格。

当将5V短路时,在DC400V的输入下VDS电压为650V 小于700,满足规格要求。
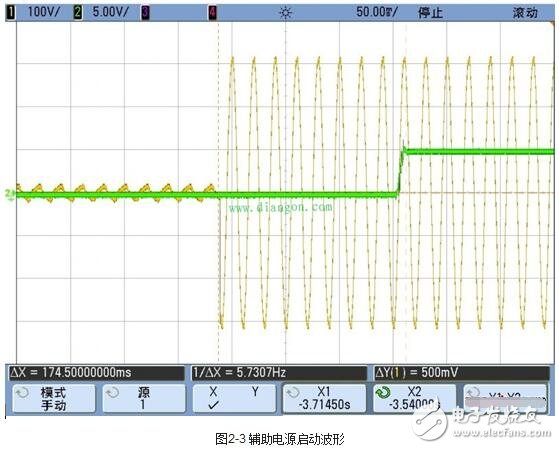
辅助源启动时间对伺服产品可靠性来说很重要,特别是对功率器件与功率器件驱动上电时序的影响很重要,在功率器件一定要保证在其驱动器件上电好以后才能上电,只有这样才可以保证在上电或断电过程中功率器件不会有误动作,避免直臂导通等严重的短路故障。
在本例中,输入交流220VAC时,测试得到5V输出启动延时为180ms,小于IPM上电启动时间,能够保证IPM驱动芯片先工作,IPM内部IGBT后工作,可以有效的预防上电短路等故障。延时波形如图2-3所示:
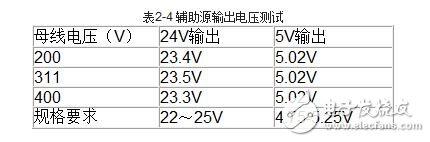
(1)输出电压测试:分别在不同母线,满载情况下,测试各路电压值如表2-4所示:(单位:V)
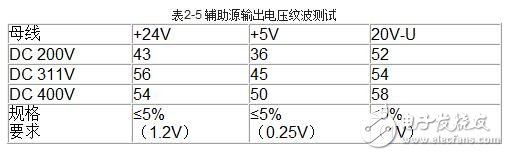
(2)输出电压纹波测试:分别在不同母线电压情况下测试满载电压情况下纹波如表2-5所示(单位:mV)
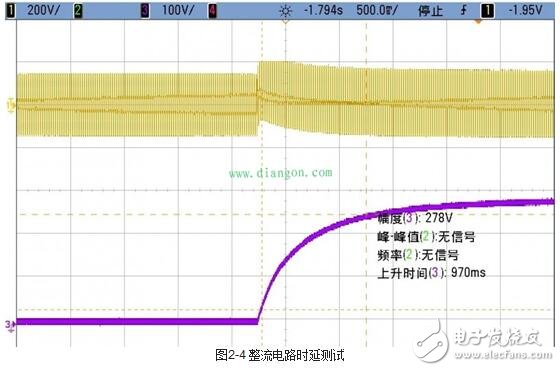
5、母线)整流延迟和整流电路启动对电网的冲击都是很关键的问题,本设计整流电路启动波形如图2-4所示,启动延时时间为125ms,满足要求。
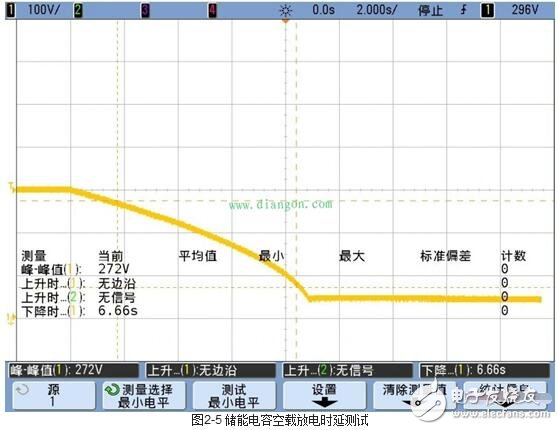
(2)图2-4可以反映储能电容充电时间,从安全等角度来讲,放电时间也是很关键的。本设计电容放电波形如图2-5所示,电容放电时间为7s,满足要求。
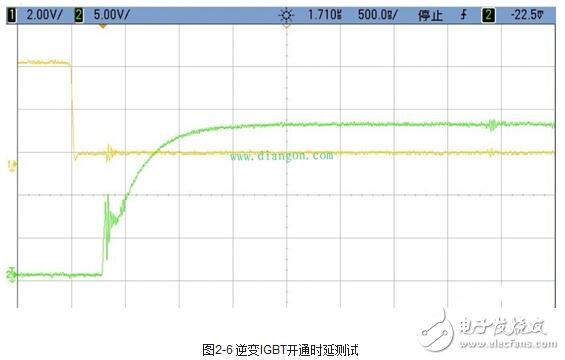
IPM内部IGBT的开通与关断波形直接影响到IPM工作的可靠性,如果开通和关断时间太长,必然有两种情况出现,一是上下开关管直臂导通造成短路故障,二是IGBT的开通和关断损耗导致IPM发热严重,长期工作不仅会对伺服驱动器以外的产品造成影响,而且直接影响IPM寿命。
如图2-7所示,上面信号为驱动信号,IGBT关断信号延时500ns,满足要求。

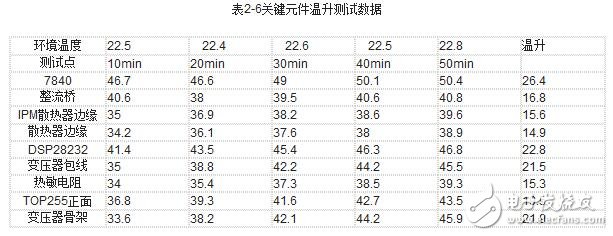
作为一个产品,使用者最关心的是产品的可靠性,可靠性不仅仅包括了产品各个器件的电应力,也包括了热应力,研究每个发热元件的温升显得很重要。
温升就是被测元件温度与环境和温度的差值,本产品定义最高的工作环境和温度为45℃,本实验是在环境和温度22.5℃下测试。由热学基本知识不难得知,在环境和温度为45℃时的元件温度就是45℃加常温下的温升。测试证明,本设计中整机下半部分模块发热不会对上半部分空间器件发热产生一定的影响,开关电源部分的器件发热量空载与满载差别不大。各个关键元件温度与最大温升如下表2-6所示,最高温升26.8度,完全满足设计的基本要求。(单位为摄氏度)
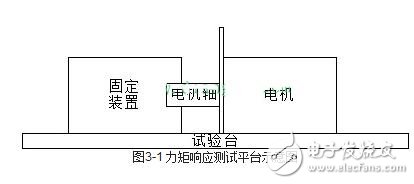
测试方法:把被测目标电机和电机轴固定装置(径向可旋转,也可以固定,类似于机床常用的分度头)稳固的固定在实验台上,并且保证电机轴和固定装置中心同心,把电机轴用固定装置固定,如图3-1所示。伺服使能,旋转固定装置,使U相电流最大,U相电流可以反映力矩大小。在阶跃的力矩指令输入条件下,U相电流的建立时间即可反映力矩响应时间。
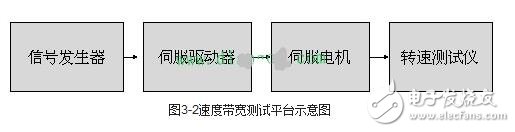
速度带宽测试方法:调整伺服驱动器参数使电机空载响应性能最佳,将最大转速限制在3000RPM,电流设定为电机额定电流。用函数信号发生器发一个频率按照正弦规律变化的脉冲信号,逐渐加大输入信号正弦变化的频率,当电机堵转时正弦变化的频率定义为伺服驱动器速度响应频率,速度带宽测试平台结构示意图如图3-2所示。
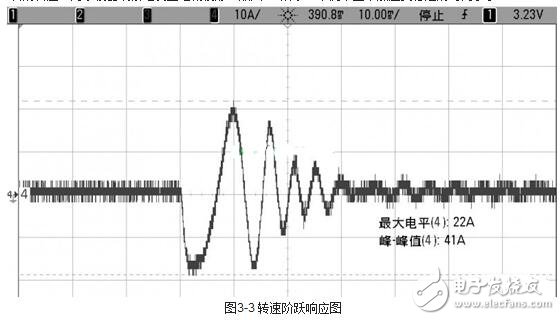
加速性能测试方法:采用阶跃响应的测试方法,本例中就是直接给一个2500转的转速,用示波器观察电机里电流波形。如图3-3所示,本例中整个加速到稳定的时间小于30ms。
伺服驱动器控制交流永磁同步伺服电机最终定位点和目标值的静态误差称为定位精度。重复定位精度是在相同转速和加减速条件下电机旋转一定角度,连续得到结果的偏差程度。
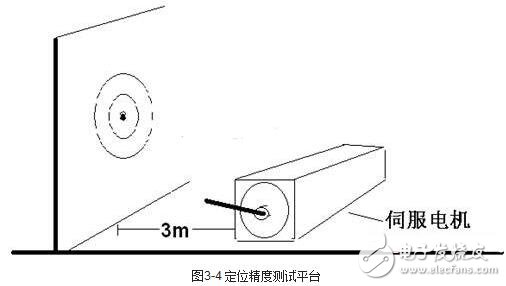
1) 测试脉冲的发送频率定为500hz,发生周期为3s,即每隔3s发送1500个脉冲,此时伺服驱动器的电子齿轮比为100/3;则正转10转,然后反转10转停止(经过电子齿轮变速后电机每转1圈需要,10000个脉冲,电机会每隔3秒转半圈),电机轴与墙面直接的距离是3m,激光笔投射到墙面上的最大偏差为2mm,经过多次测试其结果一致。利用三角函数关系可以算出偏差角度,再以360对应300脉冲,计算结果是定位精度小于1个脉冲。即伺服电机定位精度为1个脉冲,满足设计要求。
2) 测试脉冲的发送频率定为500hz,发生周期为3s,即每隔3s发送1500个脉冲,此时伺服驱动器的电子齿轮比为100/3;则正转10转,然后反转20转停止,电机轴与墙面直接的距离是3m,激光笔投射到墙面上的最大偏差也为2mm,经过多次测试其结果一致。计算结果是定位精度小于1个脉冲。即伺服电机重复定位精度为1个脉冲,满足设计要求。
回顾国内对伺服技术的研究已经很接近国外水平,但这些研究成果多停留在理论层面,没有产品化。国产伺服驱动器的发展由于起步晚,还停留在对可靠性、抗干扰性考量的层面,对性能的研究才逐步成为国产伺服驱动器开发厂家的课题。随着电子器件的发展、电子加工技术的发展,以及国产伺服厂家的成长,相信可靠性更高、性能更优良、功能更强大的伺服驱动产品会出现。